Industrieroboter wurden traditionell für Handhabungsaufgaben und das Punktschweißen eingesetzt – Aufgaben, bei denen es vor allem auf die Punktgenauigkeit ankommt. Aktuell ist der Trend zu beobachten, dass Industrieroboter auch vermehrt in Anwendungen mit höherer Bahngenauigkeit unter zusätzlicher Prozesslast zum Einsatz kommen. Das erfolgt vor allem in Einsatzszenarien, bei denen der Roboter seine Vorteile gegenüber konventionellen Werkzeugmaschinen ausspielen kann. So weisen Roboter ein überlegenes Verhältnis von Arbeitsraum und Anschaffungskosten auf. Des Weiteren ermöglicht die flexibel einsetzbare Knickarmkinematik, aufgrund der hohen Anzahl an Freiheitsgraden, die Fertigung von Bauteilen mit Freiformflächen.
Derzeit am Markt verfügbare Industrieroboter besitzen für Anwendungen mit hoher dynamischer Prozesslast meist noch keine ausreichende dynamische Steifigkeit und folglich eine geringe Bahngenauigkeit, die sich negativ auf die erzielbare Bauteilqualität auswirkt. Ein Praxiseinsatz für zerspanende Prozesse wie die Fräsbearbeitung oder das Sägen findet daher bisher meist mit Werkstoffen wie Holz und Kunststoff statt, da die wirkenden Prozesskräfte dabei im Vergleich zu Metallen geringer ausfallen.

Ursache für mangelhafte Prozessqualität
Die fehlende Genauigkeit kann auf das Übertragungsverhalten der einzelnen Gelenke zurückgeführt und als Hysterese beschrieben werden. Die Hysterese ist ein nichtlinearer Zusammenhang zwischen aufgebrachten Moment und der daraus resultierenden Gelenkposition. Dabei ist die Position neben dem Antriebsmoment auch von der Historie der Bewegung abhängig. Je nach vorangegangener Bewegungsrichtung befindet sich das Gelenk an unterschiedlichen Seiten des Umkehrspiels. Diese Hysterese kann allgemein auch an anderer Stelle in elektromechanischen Systemen beobachtet werden, z. B. bei Zahnstange-Ritzel-Antrieben in der Lineartechnik.
Einen Ansatz aus der Lineartechnik diese Hysterese zu kompensieren, stellt die elektromechanische Verspannung von Zahnstange-Ritzel-Antrieben dar. Dabei kommen zwei separate Motoren mit Ritzeln, die in dieselbe Zahnstange eingreifen, zum Einsatz. Eine Verspannung kann dann durch Vorgabe von Drehmomentdifferenzen zwischen den Motoren erfolgen. Im Rahmen des DFG-geförderten Forschungsprojektes „Verbesserung des dynamischen Verhaltens von Industrierobotern durch adaptive Getriebevorspannung“ (AdaVoS) untersuchen die beiden Institute ISW und IEW der Universität Stuttgart derzeit, wie das Konzept der elektromechanischen Verspannung nun auch in Industrierobotern zum Einsatz kommen kann. Ergebnis aktueller und zukünftiger Förderperioden soll ein Antriebssystem sein, das in konventionellen Industrierobotern ohne konstruktive Anpassungen integriert werden kann. Der Formfaktor soll also möglichst nahe an der Kombination aus Servomotor und gekapseltem Getriebe sein.
Mechanischer Aufbau
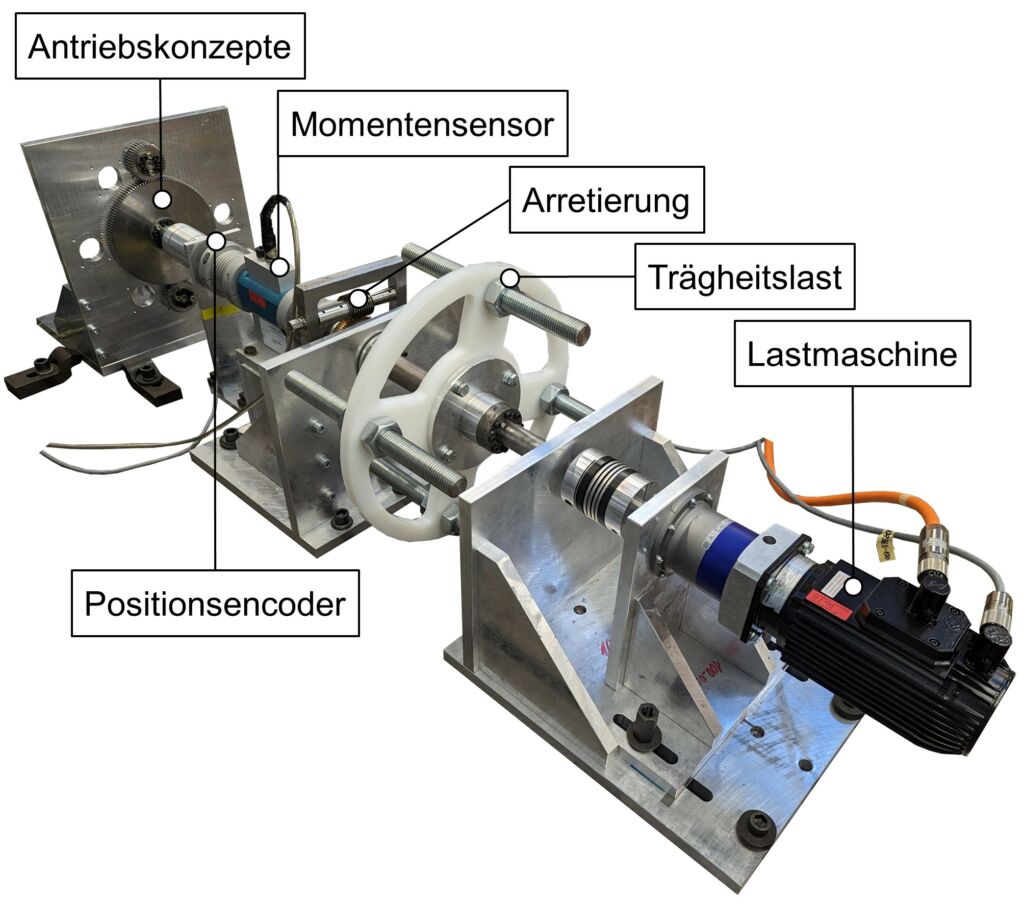
Mit Zykloidgetrieben, Wellgetrieben und Planetengetrieben finden drei Getriebearten mit ganz unterschiedlichem Aufbau die häufigste Anwendung in Industrierobotern. Für Planetengetriebe existiert dabei bereits ein patentiertes System, bei dem die einzelnen Planetenräder, zusätzlich zum Sonnenrad, bei festgehaltenem Planetenträger angetrieben und somit Sollmomente aufgebracht werden können. Das stellt einen vielversprechenden Ansatz für die Integration von einstellbarer Verspannung in Getriebe dar. Während bei Linearsystemen in der Regel zwei Antriebe verspannt werden, bieten Planetengetriebe mit ihrem komplexeren Aufbau und zahlreichen Übertragungselementen den Spielraum, die Verspannung auf mehrere Antriebselemente verteilt und an verschiedenen Stellen zu implementieren. So können die sich im Kraftfluss befindenden Planetenräder nach Überwinden des durch das Sonnenrad aufgebrachten Antriebsmoments zur Verspannung genutzt werden. Alternativ ist auch die Integration von zusätzlichen Stirnzahnrädern am Abtriebshohlrad oder ein Einsatz als Ritzelantrieb möglich, bei dem mehrere feststehende Planetenrädern einen gemeinsamen Abtrieb an Sonnen- oder Hohlrad antreiben. Diese unterschiedlichen Getriebetopologien werden derzeit weiterentwickelt und sowohl simulativ als auch experimentell hinsichtlich der erzielbaren Verspannungsmomente, Effizienz und Übertragungsverhalten an einem Prüfstand untersucht. Dieser Prüfstand bietet mit einer Lastmaschine, einstellbarer Trägheit und sowohl Momenten- als auch Positionssensorik die Möglichkeit einer umfangreichen Konzeptvalidierung.
Adaptive Verspannung
In sich verspannte Getriebe sind bereits auf dem Markt verfügbar. Die Verspannung erfolgt jedoch meist statisch, was sich negativ auf den Verschleiß und die Effizienz auswirkt. Eine Verspannung durch elektromechanische Komponenten wie elektrische Antriebe hat im Vergleich den Vorteil, dass der Grad der Verspannung adaptiv angepasst werden kann. So kann in verschiedenen Phasen der Richtungsumkehr der Bewegung einer Roboterachse die Verspannung so angepasst werden, dass die erforderliche Energie bei möglichst hohem Genauigkeitsergebnis sehr gering ist. Gleichzeitig kann die Verspannung auch an den vom Roboter ausgeführten Prozess angepasst werden. Während bei Schweißanwendungen die Prozesskraft meist keine nennenswerte Rolle für die Robotergenauigkeit spielt, haben zerspanende Anwendungen wie das Fräsen hohe und ständig wechselnde Prozesskräfte, die bei Robotern aufgrund ihrer seriellen Kinematik für Positionsabweichungen sorgen können. Bei großen Prozesskräften wirken auch größere Momente in den Gelenken – der Arbeitspunkt in der Hysteresekurve wird verschoben. Hier ist durch adaptive Verspannung eine Reaktion auf verschiedene Prozesskräfte möglich, um stets das gewünschte Bearbeitungsergebnis erzielen zu können.