Der Lehrstuhl für Fertigungsmesstechnik und Qualitätsmanagement treibt aktiv die Forschung im Bereich der linienlosen mobilen Montagesysteme (LMAS) voran. Diese zeichnen sich durch den Verzicht auf eine räumlich und zeitlich starre Verkettung der einzelnen Montagesysteme aus und ermöglichen eine (Teil-)Mobilisierung der Produktionsmittel auf einer Produktionsfläche nach dem Clean-Floor-Approach. Eine wichtige Rolle spielen hier autonome Mobile Roboter (AMR) und autonome Mobile Manipulatoren (AMM), denn sie übernehmen den Transport und im Falle von AMM sogar diverse Montageschritte. Der neuartige mobile Großroboter des WZL ermöglicht die flexible Manipulation schwerer Nutzlasten und könnte zukünftig dazu beitragen, die Produktivität produzierender Unternehmen trotz sich ändernder Rahmenbedingungen, wie etwa höherer Produkt- und Variantenvielfalt sowie Fachkräftemangel, zu steigern.
Unbegrenzter Arbeitsraum
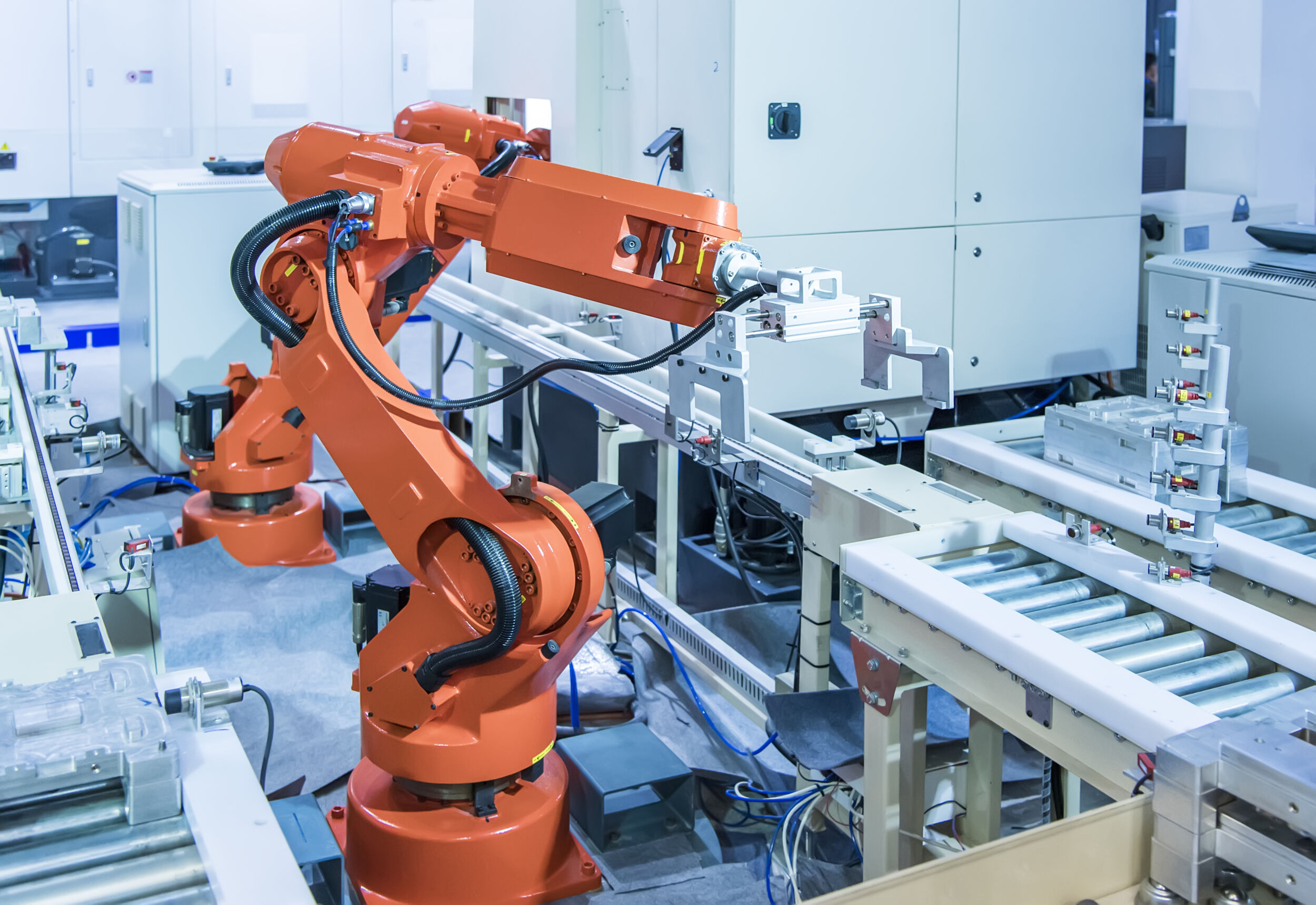
Der Arbeitsraum von fest im Boden verankerten Industrierobotern ist begrenzt. Mobile Manipulatoren ermöglichen hingegen einen flächenmäßig unbegrenzten Arbeitsraum. Dadurch kann der Roboterstandort flexibel zwischen Montagestationen bewegt werden. Diese Flexibilität erweitert die Anwendungsbereiche und adressiert die Limitationen starrer Automatisierungslösungen. Mobile Schwerlastmanipulatoren bieten die Möglichkeit, die Flexibilität in Montagesystemen zu erhöhen und stellen somit eine vielversprechende Komponente für die Montage der Zukunft dar.
Der mobile Großroboter wurde von der Broetje-Automation hergestellt. Er kann mit seinem Manipulator, einem Comau NJ-165-3.0, Nutzlasten von bis zu 150 kg bewegen. Dies könnte insbesondere die flexible Automatisierung von Montagesystemen erleichtern, bei denen mobile Cobots (mit ca. 8 kg Nutzlast) bisher an ihre Grenzen gestoßen sind. Im Zuge einer Smart-Factory-Potenzialanalyse für ihren Kunden KSB identifizierte die Managementberatung NEONEX Opti mierungschancen bei der Beschaffung der Lieferantendokumentation sowie der Erstellung von Unterlagen zur Qualitätsprüfung entlang der Supply-Chain. ‣ weiterlesen
Signifikante Ressourceneinsparung bei Pumpenhersteller KSB
NEONEX, Fabasoft Approve & KSB: „Win-win-win-Situation“ durch starke Partnerschaft
Signifikante Ressourceneinsparung bei Pumpenhersteller KSB
Roboter agiert autonom
Dank seiner Sensorik kann der Großroboter seine Umgebung wahrnehmen und autonom agieren. Der Großroboter soll in das bestehende 5G-Campusnetzwerk des 5G Industry Campus Europe integriert werden und kann dort drahtlos und in Echtzeit mit anderen Robotern und Factory Cloud Systemen kommunizieren. Die hybride Siemens-Steuerung im Großroboter ermöglicht die Ansteuerung über ein echtzeitfähiges Linux-Betriebssystem.
Die präzisen Aktuationsmöglichkeiten und die hohe Flexibilität dieser Plattform ermöglichen eine effiziente Handhabung schwerer Lasten und erlauben gleichzeitig die Umsetzung flexibler Montagesysteme in einem erweiterten Lastenspektrum.
Mit dem Großroboter plant der Lehrstuhl für Fertigungsmesstechnik und Qualitätsmanagement am WZL insbesondere im Bereich der holistischen Bewegungsplanung zu forschen. Hierbei wird eine simultane Bewegung des Manipulators mit der Basis ausgeführt, was für die Industrie bisher noch nicht realisierbar war. Durch die holistische Bewegungsplanung können mobile Manipulatoren zukünftig mit 25 Prozent schnelleren Ausführzeiten eingesetzt werden.
Die von Broetje-Automation bereitgestellte modulare Software auf Basis des Robot Operating Systems 2 (ROS2) ermöglicht es den Forschenden am WZL, zukünftig die Funktionalitäten des Großroboters zu nutzen sowie neue Algorithmen zu entwickeln.