Robotermanipulatoren
Schneller zu hochpräzisen Modellen
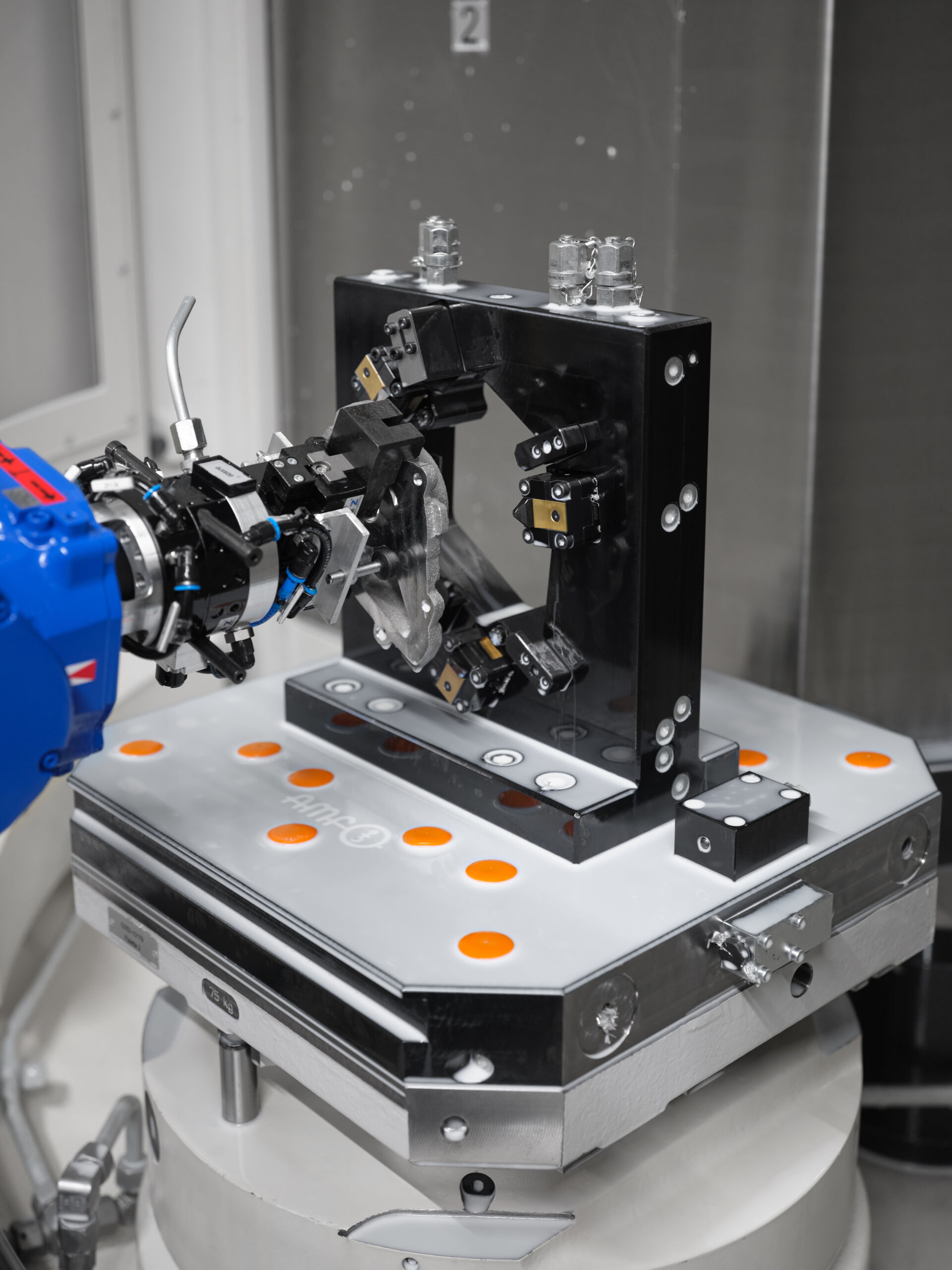
Industrieroboter übernehmen heute viele Aufgaben: vom Stapeln von Kartons auf Paletten über das Handling von Behältern bis zu Präzisionsschweißungen. Die erfolgreiche Ausführung dieser Aufgaben in der gewünschten Geschwindigkeit verlangt eine präzise Steuerung der Robotermanipulatoren. Deshalb setzen die Ingenieure im ABB-Geschäftsbereich Robotics im Entwicklungsprozess rigorose Prüfungen mit Hilfe von Simulationsmodellen ein, die bisher mit nicht besonders anwenderfreundlichen Werkzeugen erstellt werden mussten. Das hat sich jetzt geändert.
In Zusammenarbeit mit einem Forscherteam der Universität Linköping in Schweden über das industrielle Exzellenz-Center Link-Sic haben die ABB-Ingenieure im schwedischen Västerås den Einsatz von MapleSim untersucht. Ziel war es, hochpräzise Manipulatormodelle mit flexiblen Gelenken, Getrieben und dynamischer Reibung zu entwickeln und herauszufinden, wie leicht sich diese Modelle in andere Software-Werkzeuge zur Simulation und zur Entwicklung der Steuerungen exportieren und integrieren lassen. Darauf aufbauend wollte man hochpräzise Modelle erstellen, die realistisch genug sind, um den Betrieb eines echten Manipulators zu simulieren. Die Simulationen sollten aber dennoch auf einem normalen Desktop-Rechner ausführbar sein. Ihr vorheriger Prozess zur Herleitung der Modelle mit Methoden wie den Euler-Lagrange-Gleichungen funktionierte zwar gut, aber wegen der grafischen Schnittstelle von MapleSim konnten die Ableitung und Manipulation der Gleichungen entfallen. Das hat den Zeitaufwand zum Modellieren eines Manipulators deutlich verringert.
Komplexe Modelle auf Systemebene
Die umfassende Bibliothek eingebauter Komponenten in MapleSim erlaubt es dem Anwender, die einzelnen Elemente per Drag&Drop zusammenzustellen und Komponenten aus verschiedenen Domänen nahtlos miteinander zu verbinden, um komplexe Modelle auf Systemebene zu erstellen. Diese Leichtigkeit, mit der sich die Modelle erstellen lassen, hat die Arbeitsweise bei ABB deutlich verändert. Die Ingenieure verfügen nun über ein anwenderfreundlicheres und flexibleres Modellierungswerkzeug. Mit einer Kombination aus Mehrkörpermechanik, eindimensionalen mechanischen, elektrischen und benutzerdefinierten Komponenten sind sie in der Lage, mehrere Modelle eines Robotermanipulators in MapleSim in derselben Zeit zu erzeugen, die früher für ein einziges Modell benötigt wurde.
Manipulatoren im Vergleich
Die gesparte Zeit verwendete man dazu, verschiedene Ansätze zur Modellierung zu nutzen und Modelle mit unterschiedlichen Parameterwerten und Detaillierungen zu erzeugen, um zu bestimmen, wie sie ihre Entwicklungsziele am besten erreichen können. Mikael Norrlöf, Motion Control Architect im ABB-Geschäftsbereich Robotics beschreibt die Lösung so: „MapleSim hat uns geholfen, schneller und intelligenter zu arbeiten. Wir konnten schnell mehrere Modelle unseres Robotermanipulators erzeugen und sie vergleichen, um die beste Lösung zu ermitteln.“ Nachdem eine Reihe von Modellen erstellt worden war, bestand der nächste Schritt darin, sie zum Test in das übrige System zu integrieren. ABB führt die Tests auf Systemebene in einer komplexen Testumgebung durch, die auf Simulink aufbaut. Daher ist es wichtig, dass das Werkzeug zur Erzeugung der Manipulatormodelle in der Lage ist, seine Daten an Simulink zu übergeben und zu integrieren. Diese Funktion übernimmt der MapleSim Connector, mit dessen Hilfe der Anwender jedes MapleSim-Modell, auch Modelle mit benutzerdefinierten Komponenten, nach Simulink exportieren kann. Der Connector erstellt aus den symbolisch vereinfachten Systemgleichungen automatisch S-Function-Blöcke und erzeugt so Code, der kompakt und äußerst effizient ist. „Die Möglichkeit des Exports nach Simulink ist für uns sehr wichtig“, erklärt Norrlöf. „Wir konnten die erstellten Modelle nahtlos in unsere Testumgebung integrieren, ohne unseren bestehenden Workflow ändern zu müssen.“